ZLTECH 24V-36V 5A DC လျှပ်စစ် Modbus RS485 AGV အတွက် brushless motor driver controller


















လုပ်ဆောင်ချက်နှင့် အသုံးပြုမှု
1 အမြန်နှုန်း ချိန်ညှိမှုမုဒ်
ပြင်ပထည့်သွင်းမှုအမြန်နှုန်း စည်းမျဉ်း- ပြင်ပ potentiometer ၏ သတ်မှတ်ထားသော terminal 2 ခုကို GND ပေါက်နှင့် ယာဉ်မောင်း၏ +5v ပေါက်တို့ကို အသီးသီးချိတ်ဆက်ပါ။အမြန်နှုန်း ချိန်ညှိရန် ပြင်ပ potentiometer (10K~50K) ကို အသုံးပြုရန်၊ သို့မဟုတ် အခြားသော ထိန်းချုပ်ယူနစ်များ (ဥပမာ PLC၊ single-chip microcomputer နှင့် အခြားအရာများ) မှတဆင့် analog ဗို့အားကို SV end သို့ ထည့်သွင်းရန် ချိန်ညှိမှုအဆုံးကို SV end သို့ ချိတ်ဆက်ပါ။ (GND နှင့် သက်ဆိုင်သည်)။SV port ၏လက်ခံမှုဗို့အားအကွာအဝေးသည် DC OV မှ +5V ဖြစ်ပြီး၊ သက်ဆိုင်သောမော်တာအမြန်နှုန်းသည် 0 မှ အဆင့်သတ်မှတ်ထားသောအမြန်နှုန်းဖြစ်သည်။
2 မော်တာလည်ပတ်/ရပ်တန့်ထိန်းချုပ်မှု (EN)
GND နှင့် ဆက်စပ်၍ terminal EN ၏ အဖွင့်အပိတ်ကို ထိန်းချုပ်ခြင်းဖြင့် မော်တာ၏လည်ပတ်မှုနှင့် ရပ်ခြင်းကို ထိန်းချုပ်နိုင်သည်။terminal သည် conductive ဖြစ်သောအခါ, motor လည်ပတ်လိမ့်မည်;မဟုတ်ရင် မော်တာ ရပ်သွားမယ်။မော်တာရပ်တန့်ရန် run/stop terminal ကိုအသုံးပြုသောအခါ၊ မော်တာသည် သဘာဝအတိုင်း ရပ်သွားမည်ဖြစ်ပြီး ၎င်း၏ရွေ့လျားမှုဥပဒေသည် ဝန်၏ inertia နှင့် ဆက်စပ်နေသည်။
3 မော်တာရှေ့သို့/ပြောင်းပြန်လည်ပတ်ခြင်း ထိန်းချုပ်မှု (F/R)
terminal F/R နှင့် terminal GND ၏ အဖွင့်/အပိတ်ကို ထိန်းချုပ်ခြင်းဖြင့် မော်တာ၏လည်ပတ်မှုလမ်းကြောင်းကို ထိန်းချုပ်နိုင်သည်။F/R နှင့် terminal GND သည် လျှပ်ကူးခြင်းမရှိသောအခါ၊ မော်တာသည် နာရီလက်တံအတိုင်းလည်ပတ်လိမ့်မည် (မော်တာရိုးတံဘက်ခြမ်းမှ) မဟုတ်ပါက မော်တာသည် နာရီလက်တံပြောင်းပြန်လည်ပတ်မည်ဖြစ်သည်။
4 Driver Failure
ယာဉ်မောင်းအတွင်းတွင် ဗို့အားလွန်ခြင်း သို့မဟုတ် လျှပ်စီးကြောင်းများလွန်သွားသောအခါ၊ ယာဉ်မောင်းသည် အကာအကွယ်အခြေအနေသို့ ဝင်ရောက်ပြီး အလိုအလျောက် အလုပ်မလုပ်တော့ဘဲ မော်တာရပ်တန့်သွားကာ ယာဉ်မောင်းပေါ်ရှိ အပြာရောင်မီးသည် ပိတ်သွားမည်ဖြစ်သည်။enable terminal ကိုပြန်လည်သတ်မှတ်သောအခါ (ဆိုလိုသည်မှာ EN သည် GND မှချိတ်ဆက်မှုပြတ်တောက်သည်) သို့မဟုတ်ပါဝါပိတ်သွားသောအခါ driver သည်နှိုးဆော်သံကိုထုတ်ပြန်လိမ့်မည်။ဤချို့ယွင်းချက် ဖြစ်ပေါ်လာသောအခါ၊ မော်တာ သို့မဟုတ် မော်တာဝန်နှင့် ဝိုင်ယာချိတ်ဆက်မှုကို စစ်ဆေးပါ။
5 RS485 ဆက်သွယ်ရေးဆိပ်ကမ်း
ယာဉ်မောင်းဆက်သွယ်ရေးမုဒ်သည် အမျိုးသားအဆင့် GB/T 19582.1-2008 နှင့် ကိုက်ညီသည့် စံ Modbus ပရိုတိုကောကို လက်ခံပါသည်။RS485-based 2-wire serial link communication ကိုအသုံးပြု၍ Physical interface သည် သမားရိုးကျ 3-pin wiring port (A+, GND, B-) ကိုအသုံးပြုပြီး serial connection သည် အလွန်အဆင်ပြေပါသည်။
ကန့်သတ်ချက်များ
| ဒရိုက်ဘာ | ZLDBL4005S |
| အဝင်ဗို့အား(V) | 24V-36V DC |
| အထွက် လက်ရှိ(A) | 5 |
| ထိန်းချုပ်မှုနည်းလမ်း | Modbus RS485 |
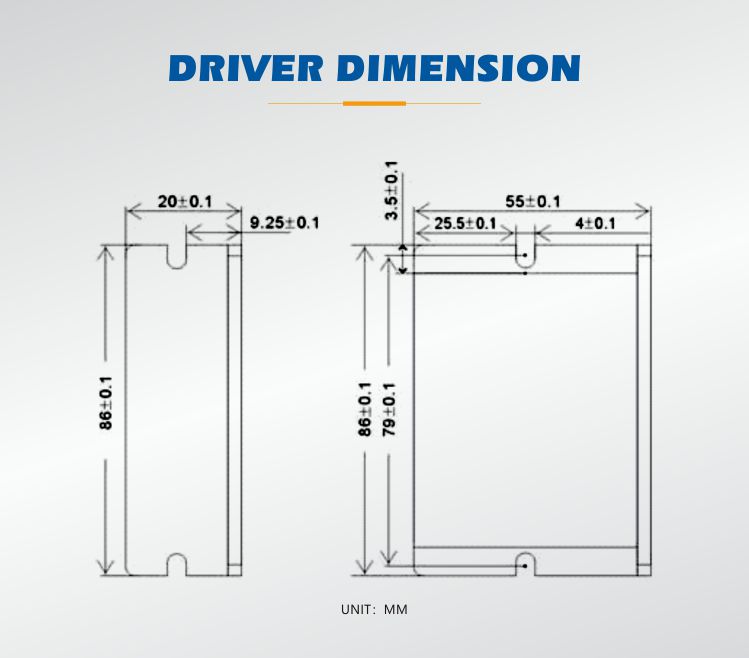
| အတိုင်းအတာ(mm) | 86*55*20mm |
| အလေးချိန် (ကီလိုဂရမ်) | ၀.၁ |
အတိုင်းအတာ
လျှောက်လွှာ

ထုပ်ပိုးခြင်း။

ထုတ်လုပ်မှုနှင့် စစ်ဆေးရေးကိရိယာ

အရည်အချင်းနှင့် အောင်လက်မှတ်

ရုံးနှင့်စက်ရုံ

ပူးပေါင်းဆောင်ရွက်ခြင်း

ထုတ်ကုန်အမျိုးအစားများ
-

2S86 ZLTECH 86 စီးရီး DC 36V 48V AC 27V-75V clo...
-

ZLTECH 24V-48V 30A Canbus Modbus နှစ်လိုင်း D...
-

ZLTECH 15 လက်မ 200kg DC brushless hub မော်တာနှင့်အတူ...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V ပေါင်းစပ်ထားသော အဆင့်...
-

ZLAC8030L ZLTECH 20V-60V 60A CanOPEN RS485 DC s...
-

ZLTECH 57mm Nema23 ပေါင်းစပ်မော်တာ d...





